Index
- BMSBattery S series
- BMSBattery S06S
- S06ST (torque sensor version)
- S06S-BL (Bluetooth version)
- PWM signals
- Phase B current signal
- Throttle
- BMSBattery S06SC
- BMSBattery S12S
- BMSBattery bottle battery controller
- LCD control panel
- Kunteng mobile app
- Bluetooh
- How to open the controller and solder the programming header
- Hardware mods
- Other controllers
- BMSBattery S06P
- Kunteng 18 mosfets motor controller
- Lishui motor controllers
- JinHui motor controllers
- GreenEBikeKit
- Torque speed
- Motor control scheme of S06S controller
- BLDC 6 steps
- PWM schemes
- So, Which PWM Technique is Best? (Part 1)
- So, Which PWM Technique is Best? (Part 2)
- So, Which PWM Technique is Best? (Part 3)
- So, Which PWM Technique is Best? (Part 4)
- So, Which PWM Technique is Best? (Part 5)
- So, Which PWM Technique is Best? (Part 6)
- So, Which PWM Technique is Best? (Part 7)
- PWM control and Dead Time Insertion
- Low inductance motors
- Throttle Control Modes
- Phase angle FOC
- PWM frequency VS motor eRPM
- Sinusoidal Control of BLDCM with Hall Sensors Based
- Self-Learn Hall Sensor Calibration Mode
- STM8S105 Alternatives
- PID algorithm - negative output values
- Regeneration
- FOC
Datasheets and application notes
- STM8S105C6T6
- Endless-sphere.com forum messages
- 2017.04.25 - Initial forum message
- 2017.05.08 - First flash and debug on a dev board
- 2017.05.18 - First code flashing and running
- 2017.05.20 - more new information
- 2017.08.23 - SxxP versus SxxS versus LSW-675
- 2017.09.01 - Trying to figure out an algorithm to automatically adjust ui8_position_correction_value
- 2017.09.02 - How to do FOC on the BMSBattery S06S/Kunteng STM8 motor controllers
- 2017.09.03 - more ideas about zero crossing for FOC
- 2017.09.05 - measuring IQ current and manually adjusting position_correction_value
- 2017.09.15 - our OpenSource firmware efficiency compared to Lishui 12 FET FOC
- 2017.09.19 - measuring motor current
- 2017.10.23 - FOC and no FOC comparison
- 2018.01.10 - How to measure FOC_READ_ID_CURRENT_ANGLE_ADJUST
- 2018.02.20 - Reading motor phase current from the DC link current (shunt)
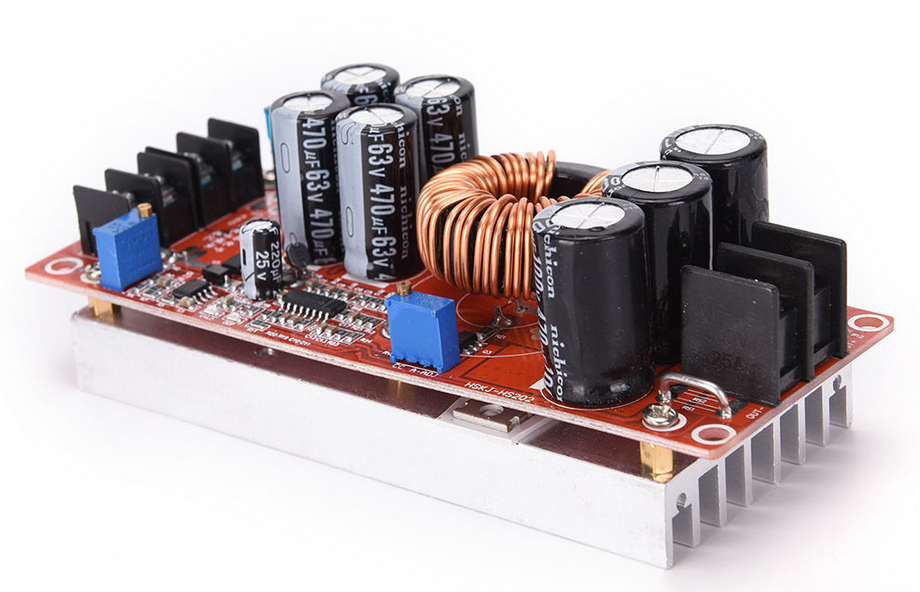
Battery voltage boost step-up converter
This voltage boost step-up converter is very cheap (15€) and can be useful to:• supply a higher voltage to the motor controller and motor than the one available on the battery pack
◇ may be good to test your system with an higher voltage, before you decide to buy/build an higher voltage battery
• the output current may be limited starting from 0.5A to the max possible value, so it can be used to test your system almost like using a lab power supply
• higher currents output: various units can be wired in parallel to sum up the output current
Disadvantages
• efficiency is listed as 95%, so at least 5% of power will be lost but this value can be even higher in worst conditions
• no regen: will not be possible to use ebrake/regen when using a direct drive motor
----
https://endless-sphere.com/forums/viewtopic.php?f=2&t=90369
A DC-DC boost converter(example) can be used between the battery and controller to step up the battery voltage to present a higher voltage to the controller. (A 36V battery can be used to drive a controller&motor with 48V.)
But, those boost converters also have the possibility of supply their output voltage (settable to any voltage higher than the input up to some limit (80v in the case of the unit linked above) at a preset constant current from 0.5A up to their maximum (20A above). My random thought was that if during testing the firmware with a new version, you fed it via the boost converter, you could preset the current available to the controller to some low value initially and then once things appear to be working okay gradually step it up, thus protecting the controller output stages.
The booster simply won't let the controller draw more current than the value you preset, and if it attempts to, automatically falls back to some low value -- 5A is mentioned the linked modules blurb. That way, if anything goes wrong in the logic and the controller attempts to draw big current, you would get a heads up and avoid blowing your FETS.